Associate Professor
McConnell Building, Room 318
3480 University Street
Montréal, QC, H3A 0E9, Canada

Teaching
Courses for Fall 2025 and Winter 2026
- COMP 557 Fall 2025, Fundamentals of Computer Graphics
- COMP 602 Fall 2025, Computer Science Seminar 1
- COMP 604 Fall 2025, Graduate School Fundamentals
- COMP 603 Winter 2026, Computer Science Seminar 2
- COMP 559 Winter 2026, Fundamentals of Computer Animation.
Research Interests and Information
My research interests are in computer graphics and physically based animation, with a focus on differentiable, adaptive, and reduced-order simulation methods. I study the modeling, simulation, and control of physical systems involving fluids, rigid and deformable bodies, contact, and friction, often with an emphasis on inverse problems and optimization-based control. A central theme of my work is the integration of physical simulation with machine learning, including differentiable simulators, neural representations, and learned reduced models that enable efficient computation, control, and animation. I am especially interested in combining real-world measurements, approximate physical models, and data-driven methods to build practical and scalable simulation systems. Applications of this research include computer animation for games and film, interactive and training simulations, and robotics.
McGill University Computer Animation Research YouTube Channel
Research Projects and Publications
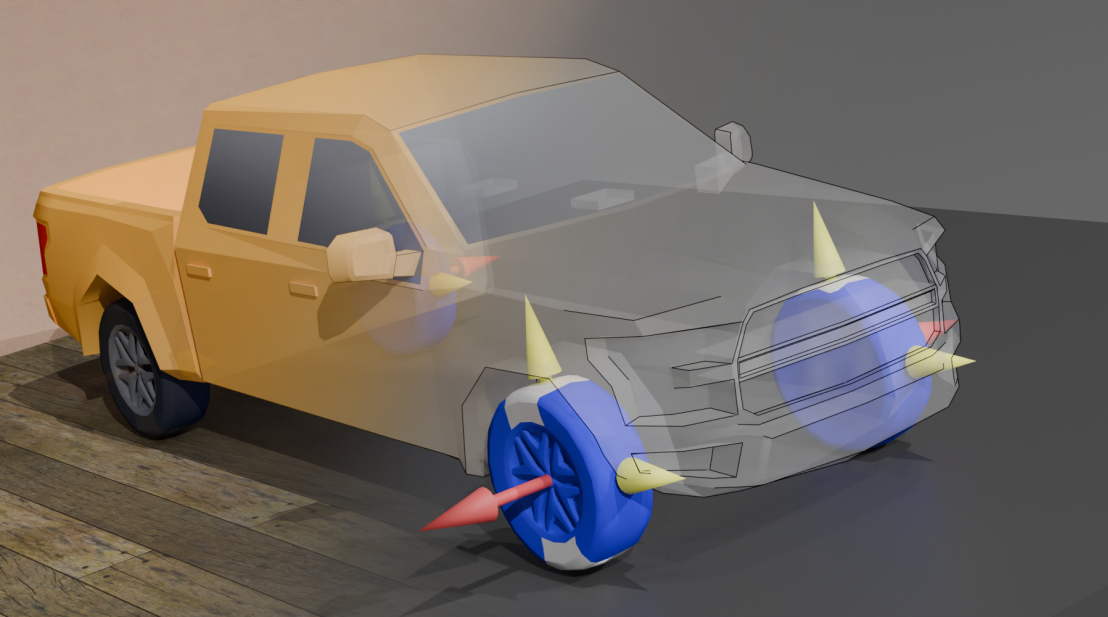 |
Rig my ride: Automatic rigging of physics-based vehicles for games Symposium on Comptuer Animation (SCA/PACM), 2025 |
 |
 |
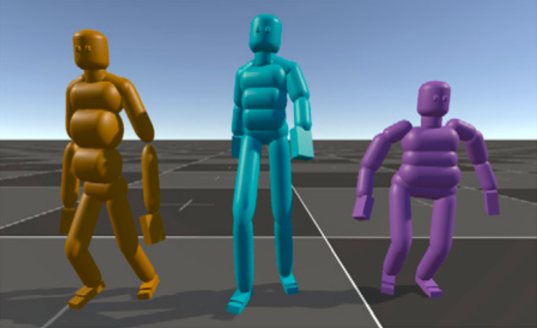 |
Imitation in relative terms using ReGAIL: Making motion controllers agile and transferable Computers & Graphics, 2025 |
 |
 |
 |
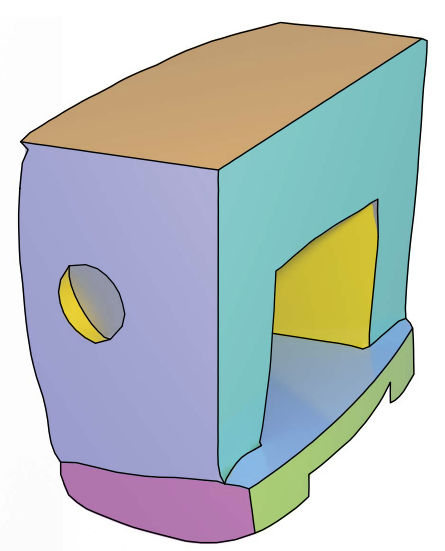
Generalized eXtended finite element method for deformable cutting via Boolean operations Symposium on Computer Animation (SCA/CGF), 2024 🏆 BEST PAPER |
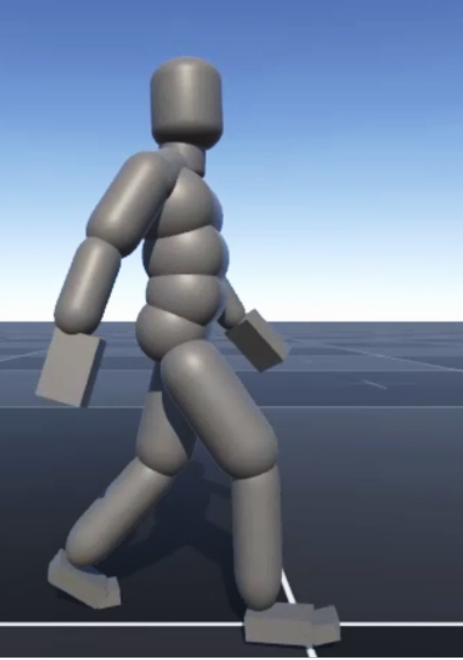 |
ReGAIL: Toward Agile Character Control From a Single Reference Motion ACM SIGGRAPH Conference on Motion, Interaction, and Games (MIG), 2024 |
 |
 |
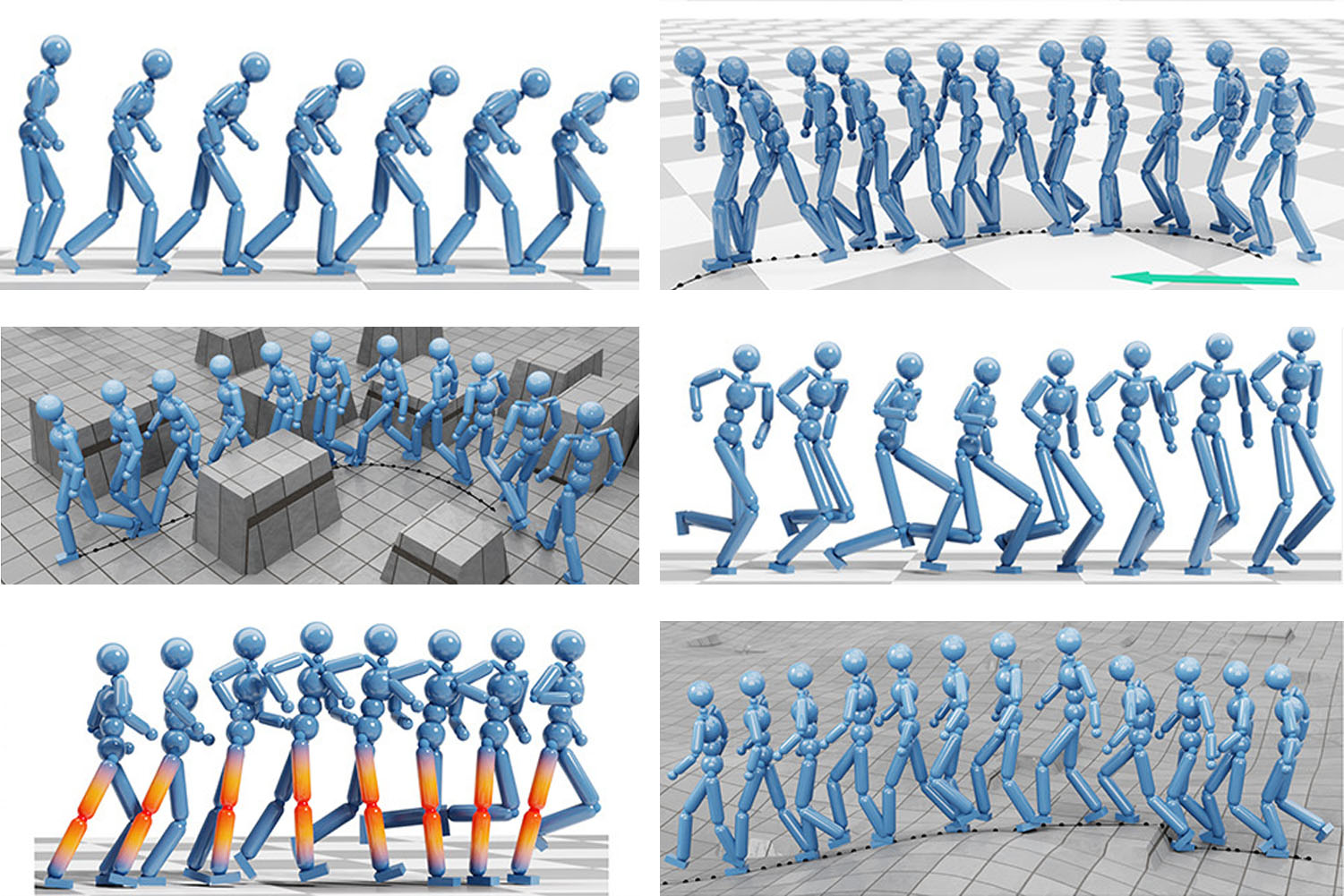 |
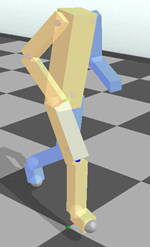
AdaptNet: Policy Adaptation for Physics-Based Character Control ACM Transactions on Graphics (SIGGRAPH Asia), 2023 |
 |
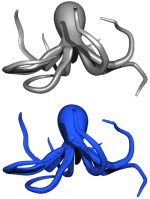
Data-Free Learning of Reduced-Order Kinematics ACM Transactions on Graphics (SIGGRAPH), 2023 |
 |
Temporal Set Inversion for Animated Implicits ACM Transactions on Graphics (SIGGRAPH), 2023 |
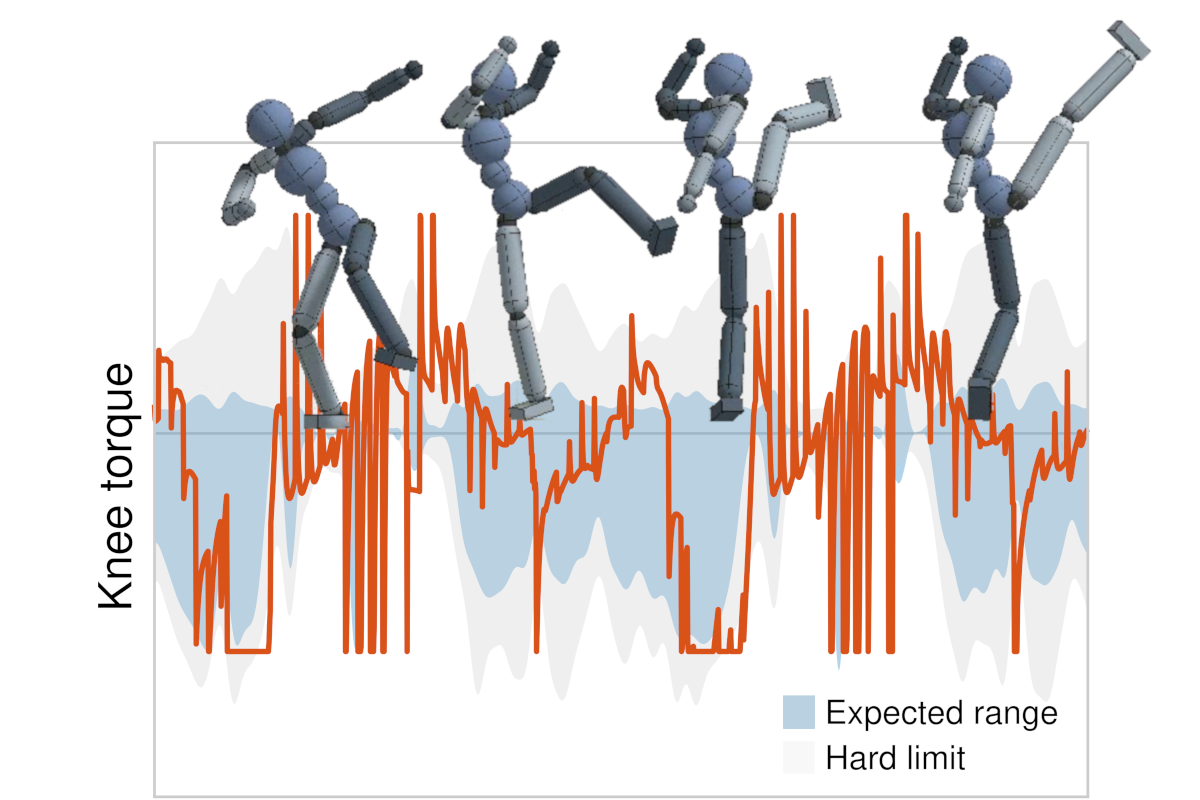 |
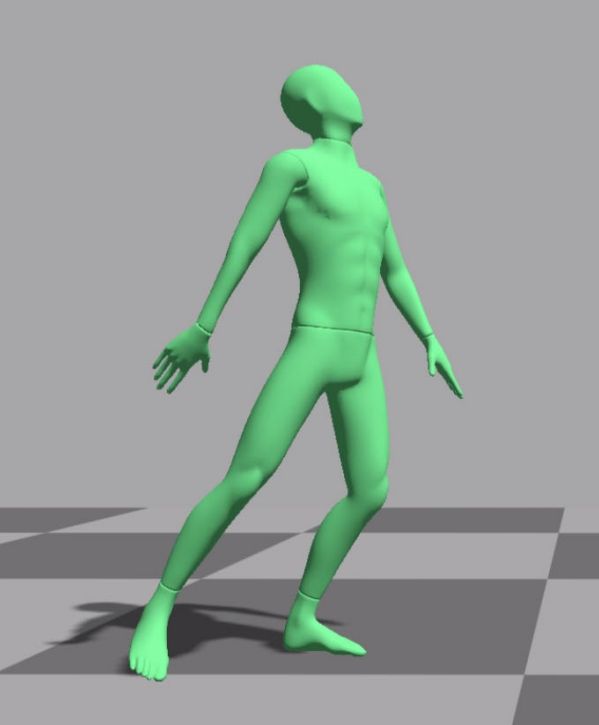
Too Stiff, Too Strong, Too Smart: Evaluating Fundamental Problems with Motion Control Policies Symposium on Comptuer Animation (SCA/PACM), 2023 |
 |
Adaptive Rigidification of Discrete Shells Symposium on Computer Animation (SCA/PACM), 2023 |
 |
 |
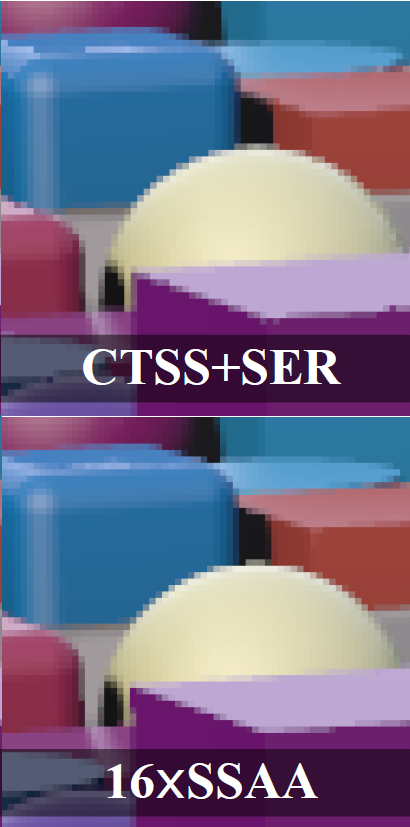
Cone-Traced Supersampling for Signed Distance Field Rendering Graphics Interface, 2023 🏆 BEST PAPER |
 |
Parallel Block Neo-Hookean XPBD using Graph Clustering Computers & Graphics (MIG), 2022 |
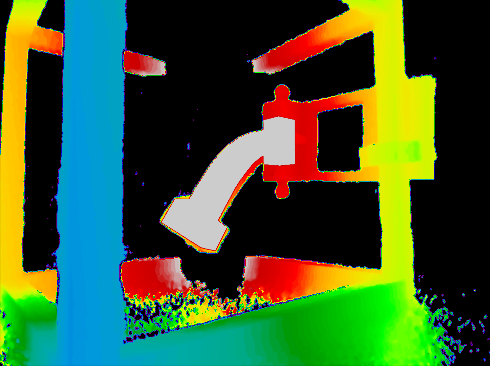 |
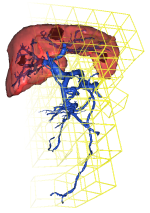
Differentiable Depth for Real2Sim Calibration of Soft Body Simulations Computer Graphics Forum, 2022 |
 |
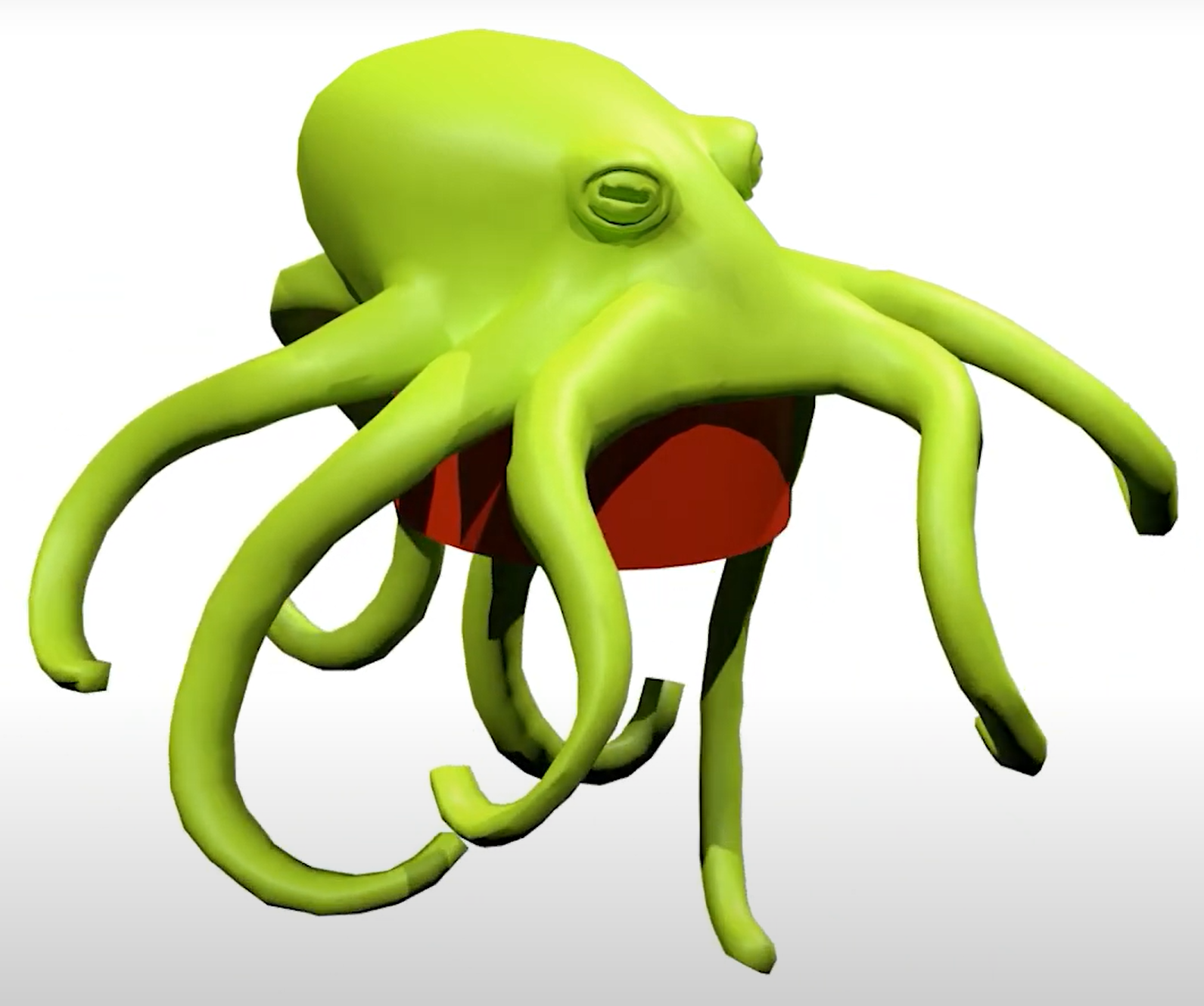
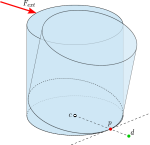
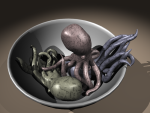
Constraint-based Simulation of Passive Suction Cups ACM Transactions on Graphics (TOG), 2022 |
 |
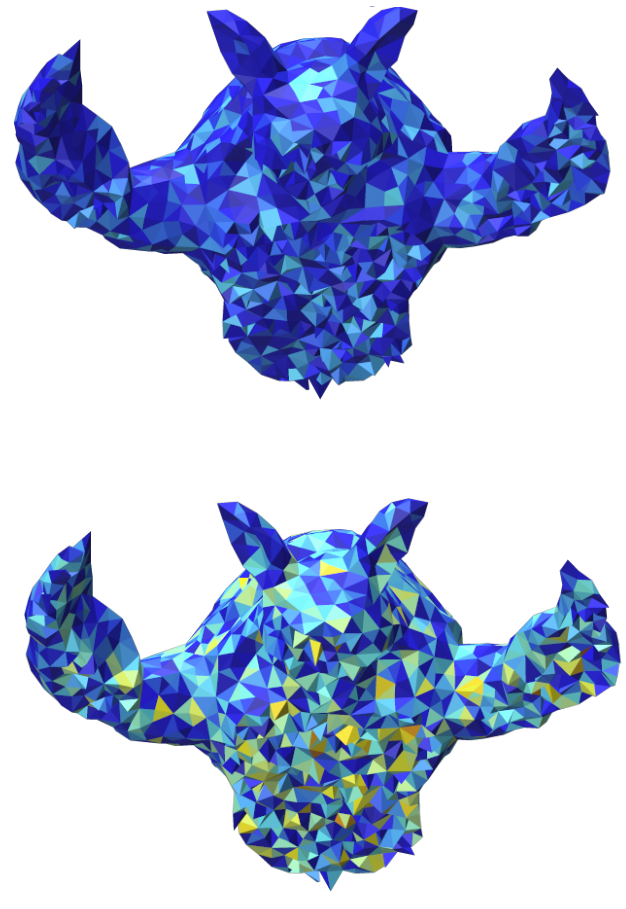
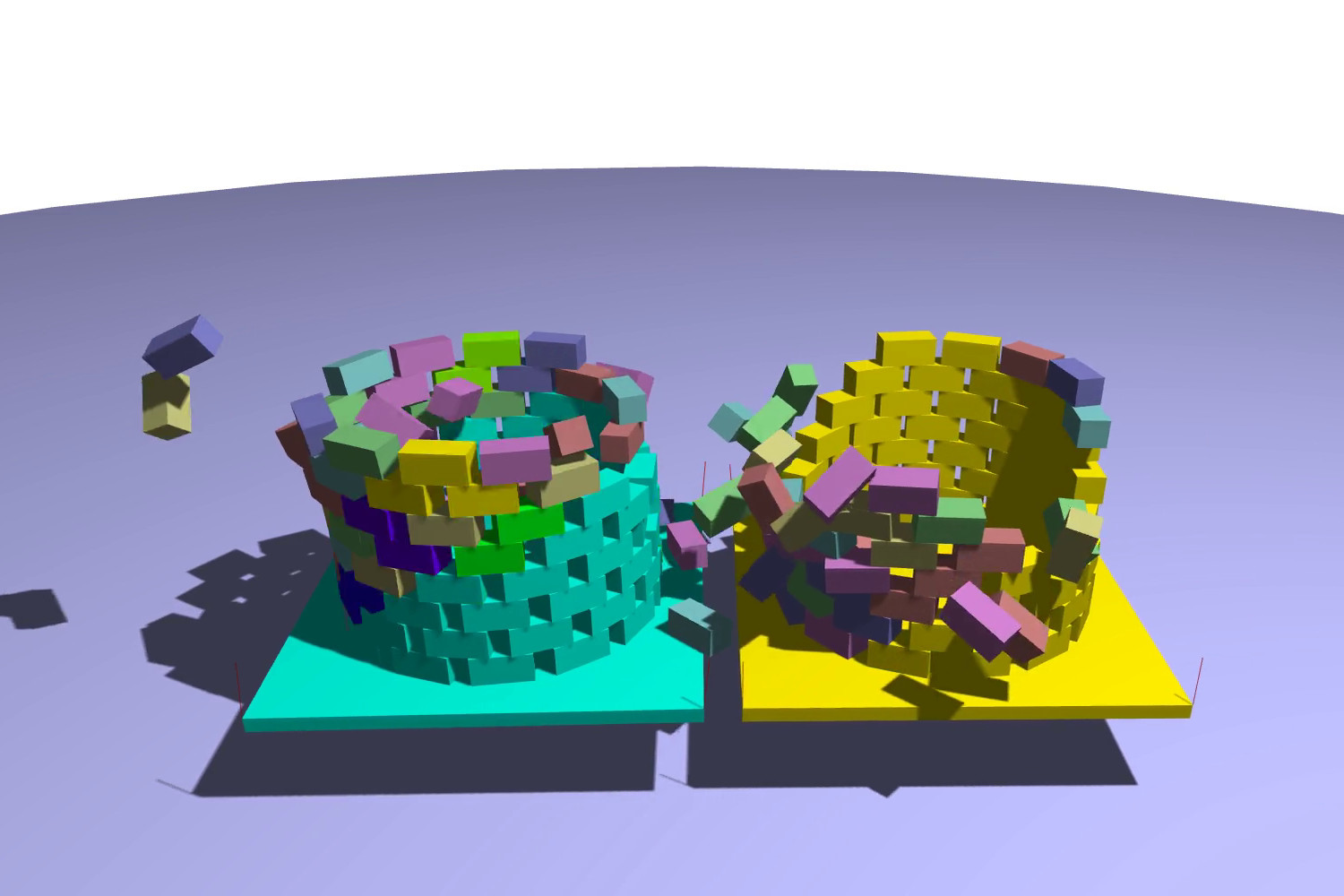
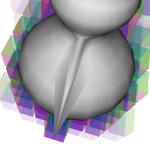
Adaptive rigidification of elastic solids ACM Transactions on Graphics (SIGGRAPH), 2022 |
 |
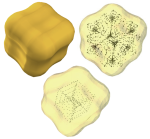
Active Learning Neural C-space Signed Distance Fields for Reduced Deformable Self-Collision Graphics Interface (GI), 2022 |
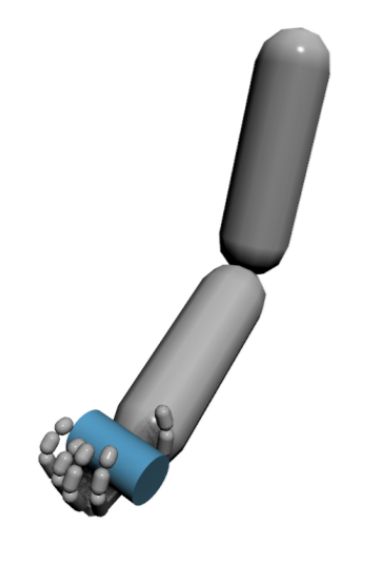 |
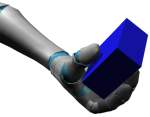
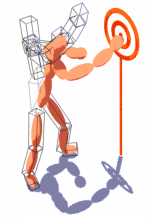
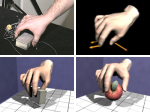
Catching and throwing control of a physically simulated hand Motion, Interaction and Games (MIG), 2021 |
 |
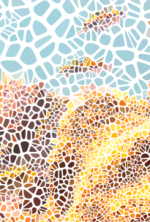
Coupling friction with visual appearance Symposium on Computer Animation (SCA/PACM), 2021 |
 |
 |
 |
Learning Elastic Constitutive Material and Damping Models Pacific Graphics (CGF), 2020 |
 |
Distant Collision Response in Rigid Body Simulations SCA, 2020 |
 |
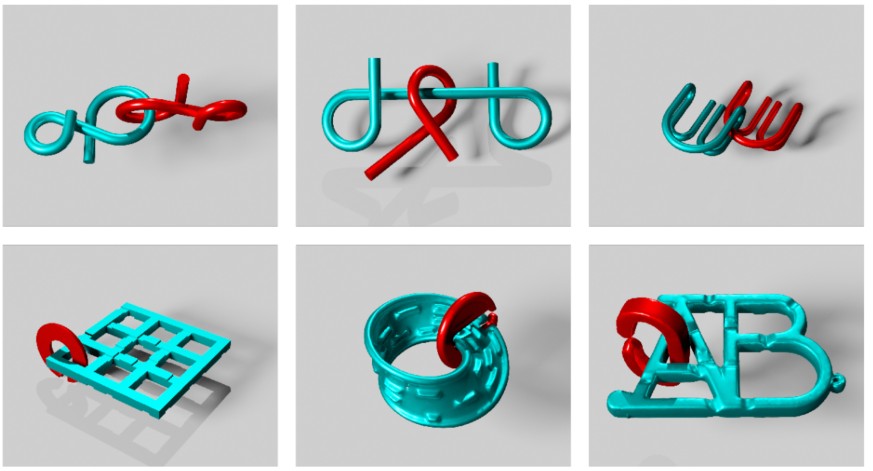 |
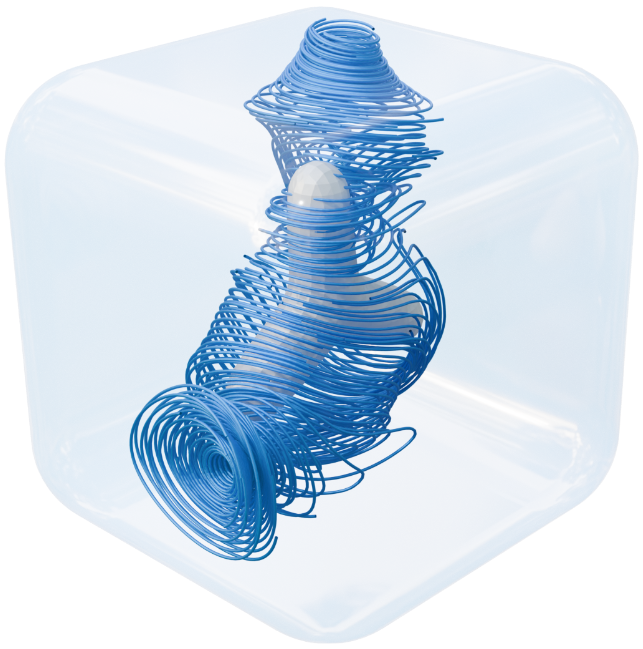
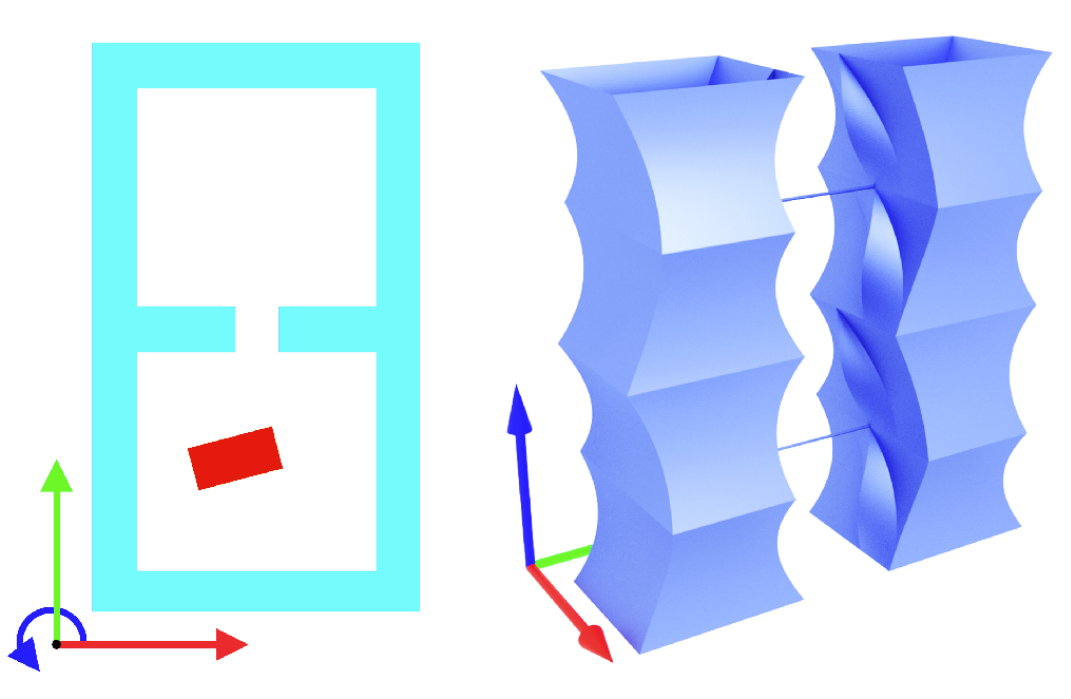
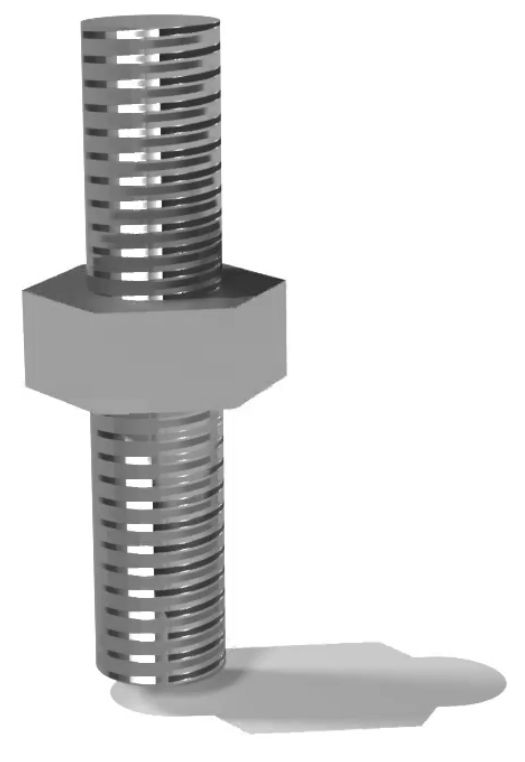
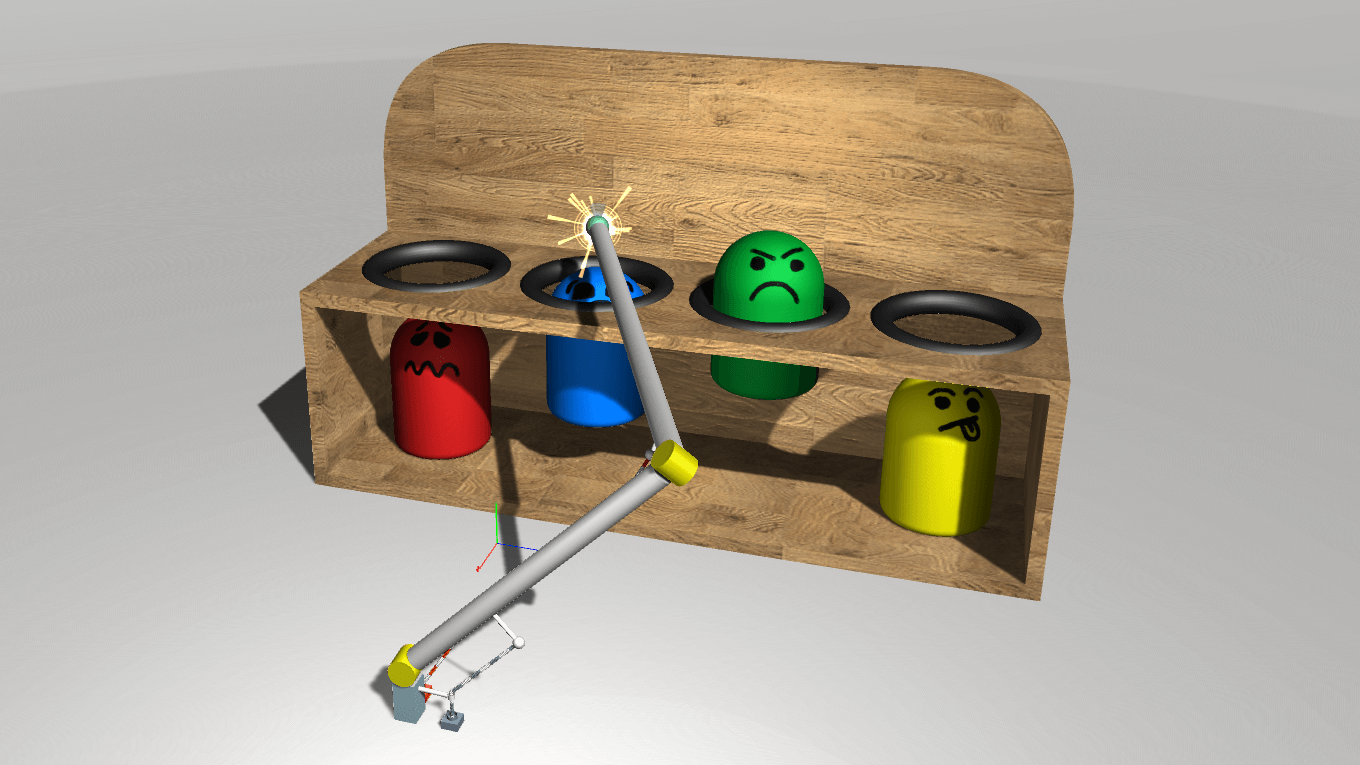
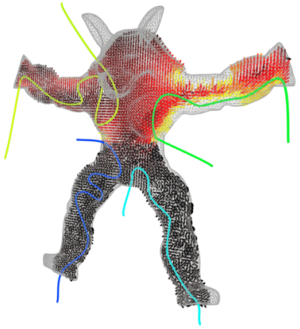
C-Space Tunnel Discovery for Puzzle Path Planning SIGGRAPH, 2020 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
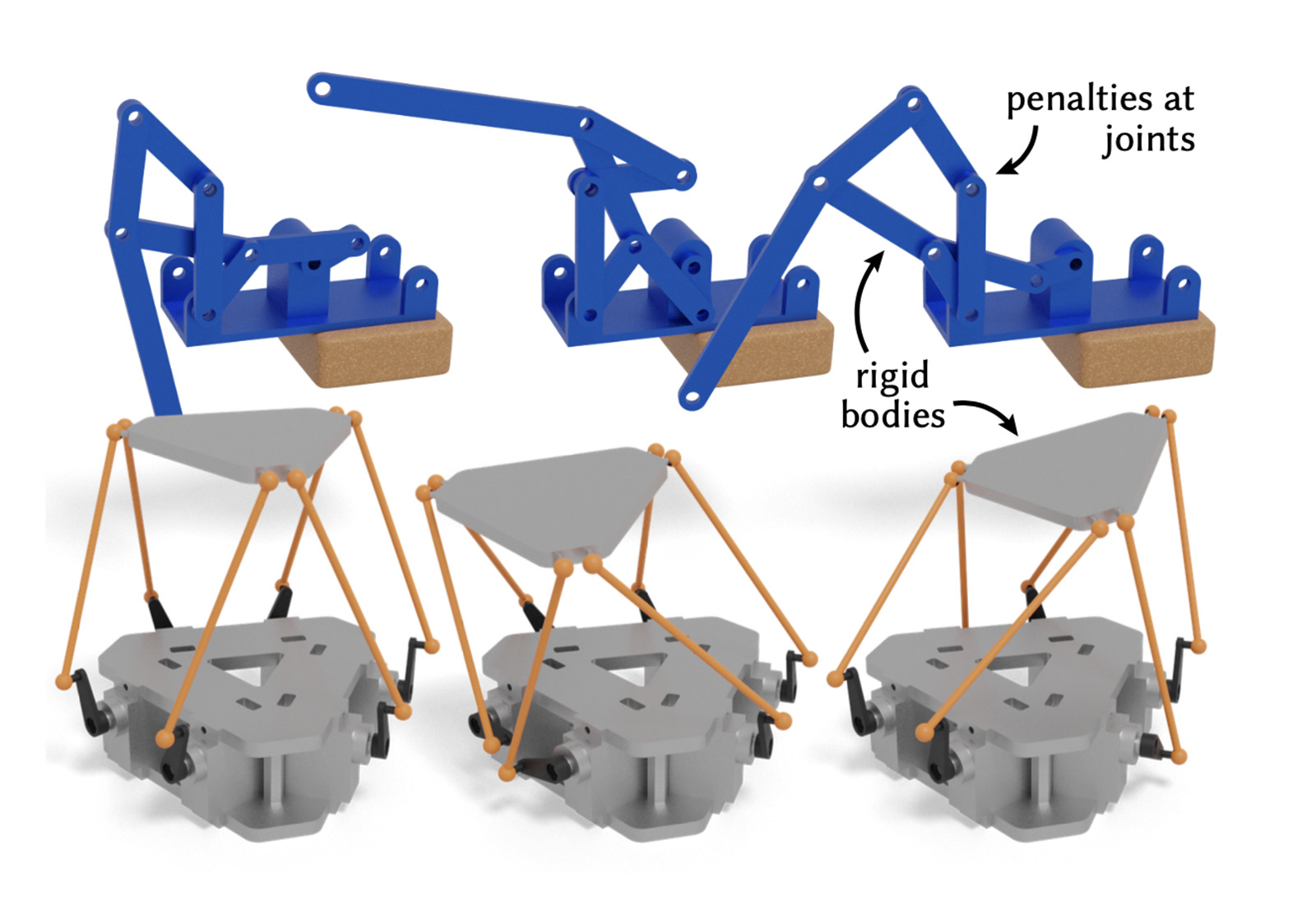
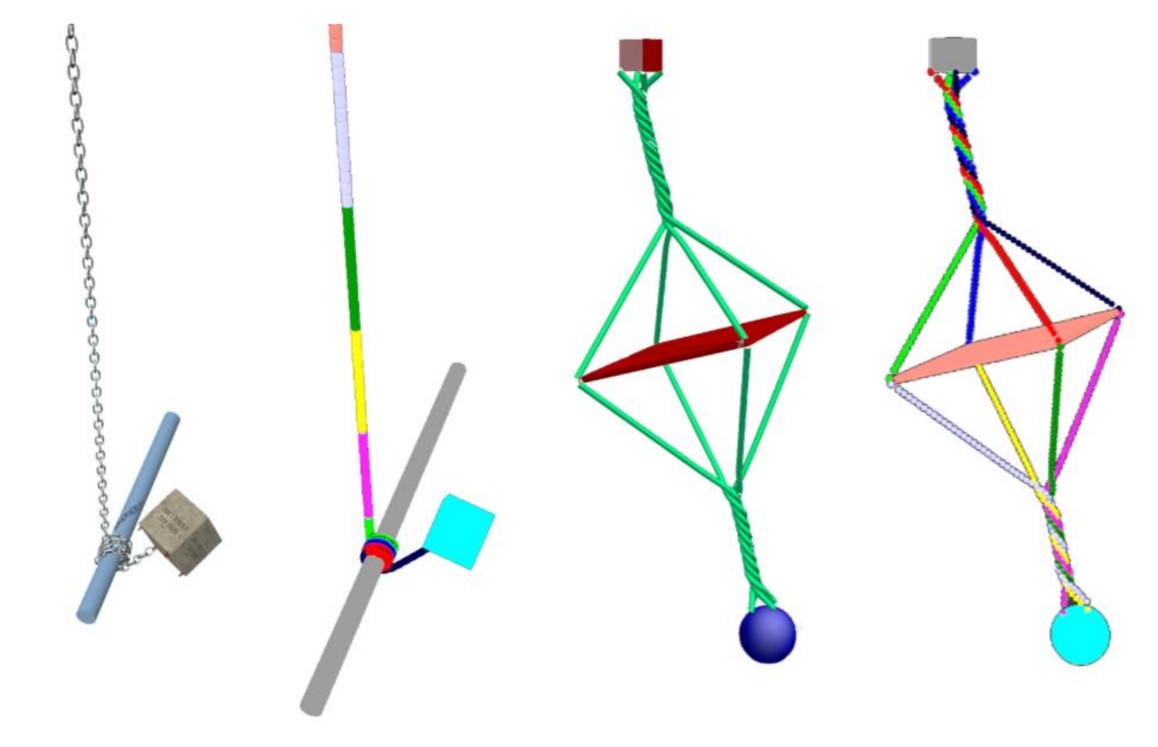
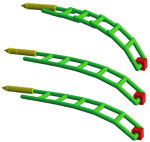
Task-based design of cable-driven articulated mechanisms Symposium on Computational Fabrication, 2017 |
 |
Geometric Stiffness for Real-time Constrained Multibody Dynamics Eurographics, 2017 |
 |
Tunable Robustness: An Artificial Contact Strategy with Virtual Actuator Control for Balance Computer Graphics Forum, 2017 |
 |
 |
 |
Anticipatory balance control and dimension reduction Computer animation & virtual worlds, 2016 |
 |
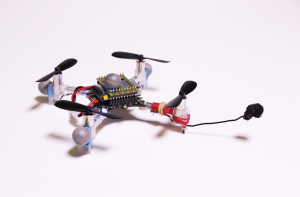 |
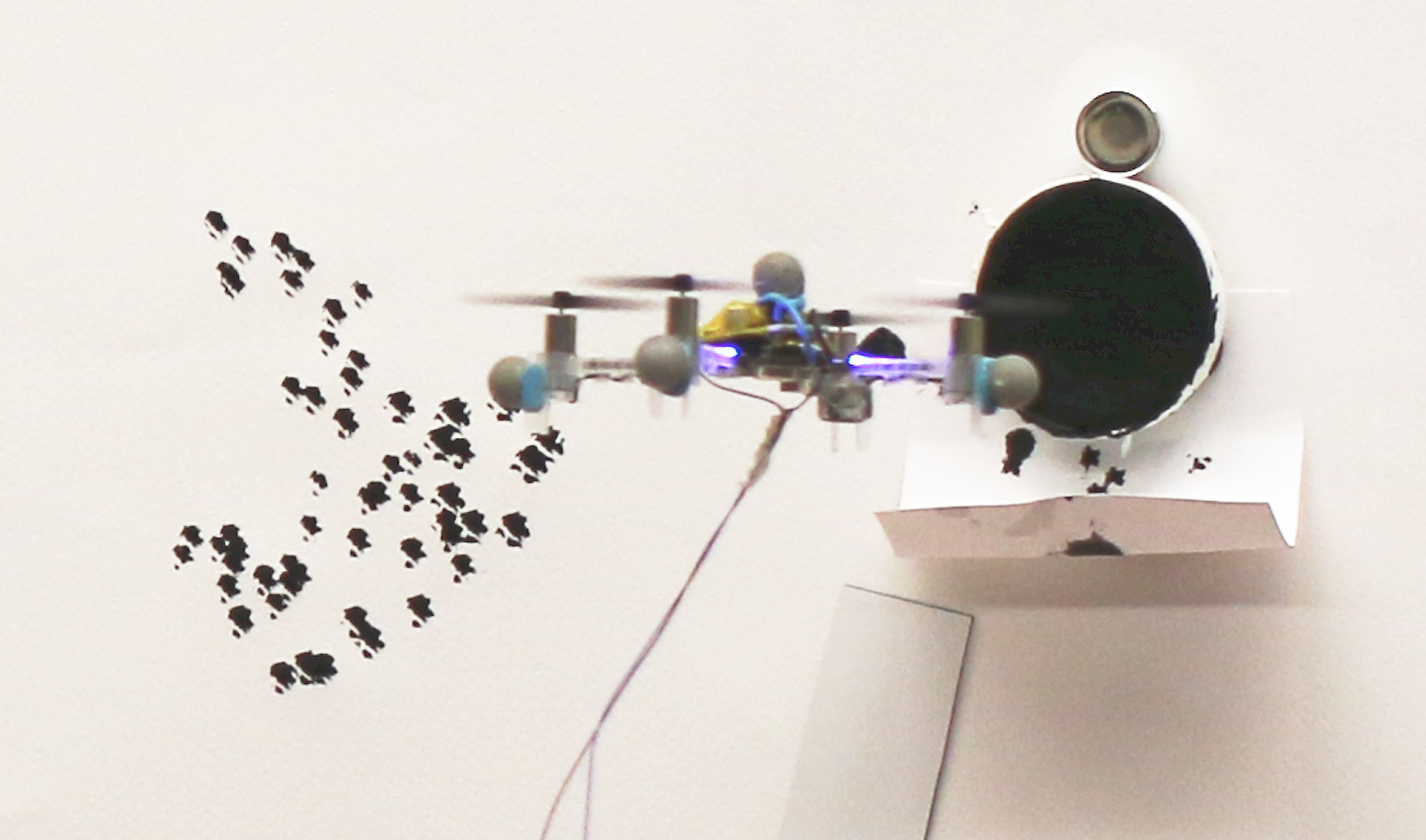
Stippling with aerial robots Computational Aesthetics / Expressive, 2016 🏆 BEST PAPER |
 |
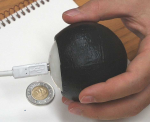
DefSense: Computational Design of Customized Deformable Input Devices ACM SIGCHI, 2016 |
 |
 |
Interactive procedural simulation of paper tearing with sound Motion in Games, 2015 |
 |
Blended linear models for reduced compliant mechanical systems IEEE Transactions on Visualization and Computer Graphics, 2015 |
 |
 |
Anticipatory Balance Control ACM SIGGRAPH Conference on Motion in Games, 2014 🏆 SELECTED FOR CAVW |
 |
Multi-layer skin simulation with adaptive constraints ACM SIGGRAPH Conference on Motion in Games, 2014 |
 |
FORK-1S: Interactive compliant mechanisms with parallel state computation ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, 2014 🏆 SELECTED FOR TVCG |
 |
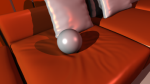
Data-driven Fingertip Appearance for Interactive Hand Simulation ACM SIGGRAPH conference on Motion in Games, 2013 |
 |
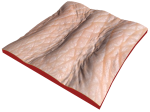
Embedded Thin Shells for Wrinkle Simulation ACM Transactions on Graphics (SIGGRAPH), 2013 |
 |
Goal Directed Multi-Finger Manipulation: Control Policies and Analysis Computers & Graphics, 2013 |
 |
 |
 |
 |
 |
Inverse Kinodynamics: Editing and Constraining Kinematic Approximations of Dynamic Motion Computers & Graphics, 2012 |
 |
 |
Inverse Kinodynamics:Editing and Constraining Kinematic Approximations of Dynamic Motion Graphics Interface, 2012, 🏆 BEST PAPER |
 |
 |
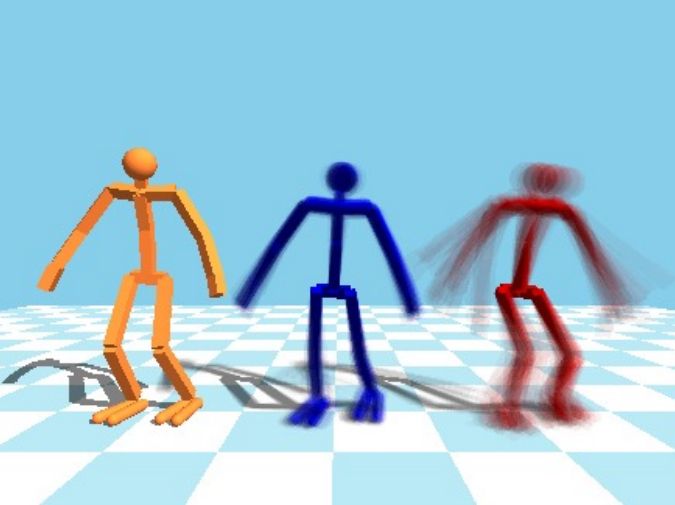
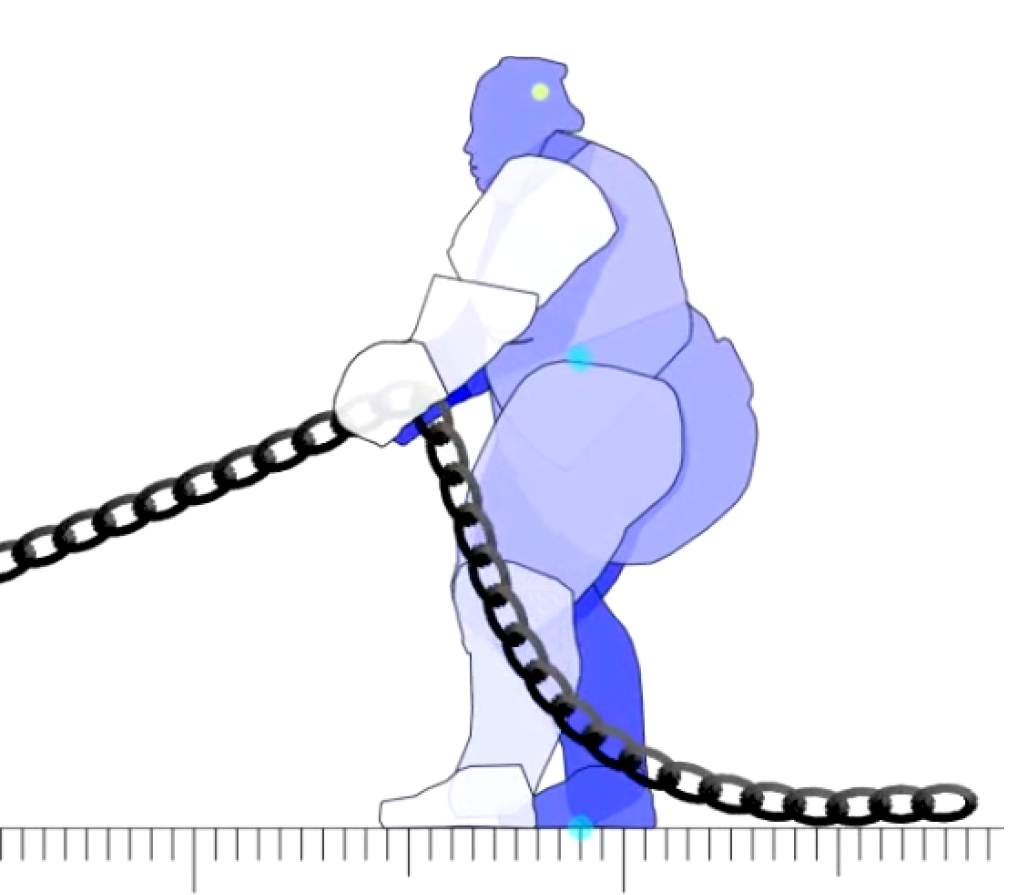
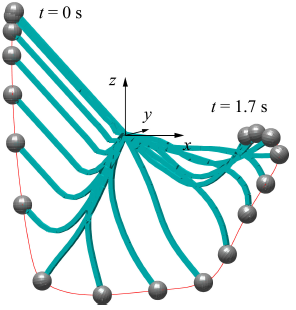
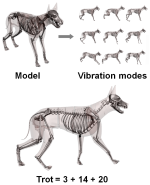
Using Natural Vibrations to Guide Control for Locomotion ACM Siggraph Symposium on Interactive 3D Graphics and Games (I3D), 2012 |
 |
 |
Advances in Modal Analysis Using a Robust and Multiscale Method EURASIP Journal on Advances in Signal Processing, 2010 |
 |
 |
 |
 |
 |
Preserving Topology and Elasticity for Embedded Deformable Models SIGGRAPH, 2009 |
 |
Modal Locomotion: Animating Virtual Characters with Natural Vibrations Eurographics, 2009 |
 |
 |
 |
Animating Virtual Character Locomotion and Other Oscillatory Motions
Cognitive Animation Workshop 2008 / SIGGRAPH Sketches 2007
|
 |
 |
 |
 |
Interaction Capture and Synthesis of Human Hands PhD Thesis, 2005 |
 |
 |
Continuous Contact Simulation for Smooth Surfaces ACM Transactions on Graphics, 22:1, 2003 |
 |
EigenSkin: Real Time Large Deformation Character Skinning in Graphics Hardware ACM SIGGRAPH Symposium on Computer Animation, 2002 |
 |
FoleyAutomatic: Physically-based Sound Effects for Interactive Simulation and Animation SIGGRAPH, 2001 |
 |
 |