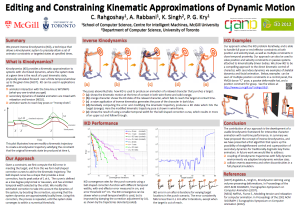
We present inverse kinodynamics (IKD), an animator friendly kinematic
workflow that both encapsulates short-lived dynamics and allows
precise space-time constraints. Kinodynamics (KD), defines
the system state at any given time as the result of a kinematic state
in the recent past, physically simulated over a short temporal window
to the present. KD is a well suited kinematic approximation
to animated characters and other dynamic systems with dominant
kinematic motion and short-lived dynamics. Given a dynamic system,
we first choose an appropriate kinodynamic window size based
on accelerations in the kinematic trajectory and the physical properties
of the system. We then present an inverse kinodynamics (IKD)
algorithm, where a kinodynamic system can precisely attain a set
of animator constraints at specified times. Our approach solves the
IKD problem iteratively, and is able to handle full pose or end effector
constraints at both position and velocity level, as well as multiple
constraints in close temporal proximity. Our approach can also
be used to solve position and velocity constraints on passive systems
attached to kinematically driven bodies. We show IKD to be
a compelling approach to the direct kinematic control of character,
with secondary dynamics via examples of skeletal dynamics and
facial animation.
Graphics Interface 2012. Best Paper, Graphics. Paper [PDF, 1.5 MB] Movie download [WMV, 100 MB]
ACM SIGGRAPH Symposium on Interactive 3D graphics and Games 2012, Poster session. Best Poster Honourable Mention. Poster Abstract [PDF, 340 KB] Poster [PDF, 2.5 MB]