|
FORK-1S: Interactive Compliant Mechanisms with Parallel State Computation
|
Sheldon Andrews
McGill University
|
Marek Teichmann
CM Labs Simulations
|
Paul G. Kry
McGill University
|
|
Abstract
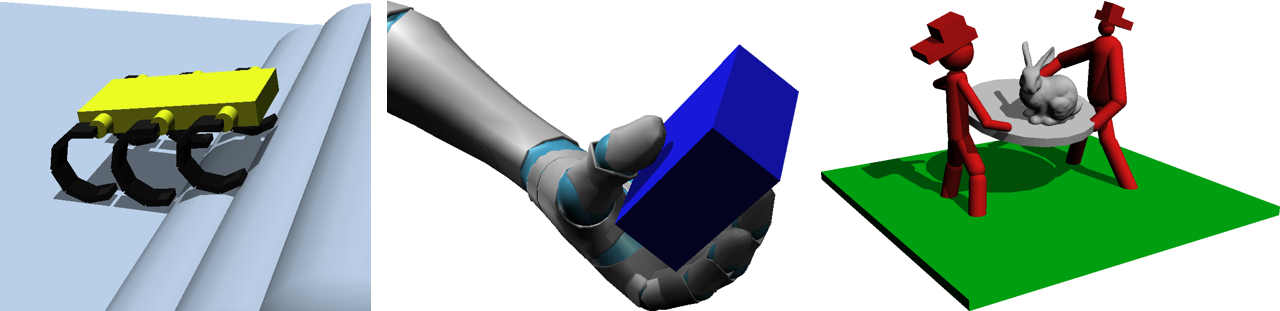
We present a method for the simulation of compliant, articulated structures using a plausible approximate model that focuses on modeling endpoint interaction. We approximate the structure’s behavior about a reference configuration, resulting in a first order reduced compliant system, or FORK-1S. Several levels of approximation are available depending on which parts and surfaces we would like to have interactive contact forces, allowing various levels of detail to be selected. Our approach is fast and computation of the full structure’s state may be parallelized. Our approach is suitable for stiff, articulate grippers, such as those used in robotic simulation, or physics based characters under static proportional derivative control. We demonstrate that simulations with our method can deal with kinematic chains and loops with non-uniform stiffness across joints, and that it produces plausible effects due to stiffness, damping, and inertia.
|
| |
|
|
|
|
|
BibTeX
@inproceedings{FORKS2014,
title = "FORKS: Interactive Compliant Mechanisms with Parallel State Computation",
journal = "ACM Symposium on Interactive 3D Graphics and Games (I3D)",
year = "2014",
author = "S. Andrews and M. Teichmann and P.G. Kry",
url = {http://doi.acm.org/10.1145/2556700.2556717},
doi = {10.1145/2556700.2556717},
}
|
|

